西门子PLC模块CPU200XPCN






西门子PLC模块CPU200XPCN西门子PLC模块CPU200XPCN西门子PLC模块CPU200XPCN
| 6ES7211-1BE40-0XB0 | CPU 1211C AC/DC/Rly,6输入/4输出,集成2AI |
| 6ES7211-1AE40-0XB0 | CPU 1211C DC/DC/DC,6输入/4输出,集成2AI |
| 6ES7211-1HE40-0XB0 | CPU 1211C DC/DC/Rly,6输入/4输出,集成2AI |
| 6ES7212-1BE40-0XB0 | CPU 1212C AC/DC/Rly,8输入/6输出,集成2AI |
| 6ES7212-1AE40-0XB0 | CPU 1212C DC/DC/DC,8输入/6输出,集成2AI |
| 6ES7212-1HE40-0XB0 | CPU 1212C DC/DC/Rly,8输入/6输出,集成2AI |
| 6ES7214-1BG40-0XB0 | CPU 1214C AC/DC/Rly,14输入/10输出,集成2AI |
| 6ES7214-1AG40-0XB0 | CPU 1214C DC/DC/DC,14输入/10输出,集成2AI |
| 6ES7214-1HG40-0XB0 | CPU 1214C DC/DC/Rly,14输入/10输出,集成2AI |
| 6ES7215-1BG40-0XB0 | CPU 1215C AC/DC/Rly,14输入/10输出,集成2AI/2AO |
| 6ES7215-1AG40-0XB0 | CPU 1215C DC/DC/DC,14输入/10输出,集成2AI/2AO |
| 6ES7215-1HG40-0XB0 | CPU 1215C DC/DC/Rly,14输入/10输出,集成2AI/2AO |
| 6ES7217-1AG40-0XB0 | CPU 1217C DC/DC/DC,14输入/10输出,集成2AI/2AO |
| 6ES72211BF320XB0 | SM1221 数字量输入模块, 8 输入24V DC |
| 6ES72211BH320XB0 | SM1221 数字量输入模块, 16 输入24V DC |
| 6ES72221HF320XB0 | SM1222 数字量输出模块, 8输出继电器 |
剖析机器人的坐标系吧!(以ABB机器人举例说明)
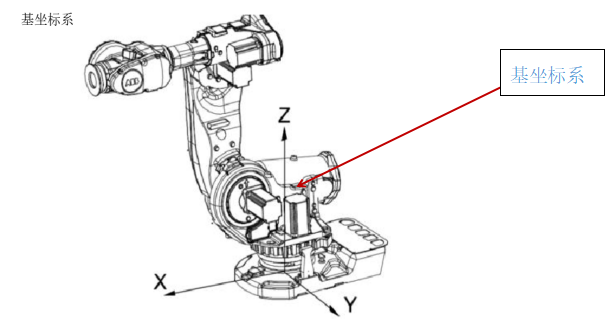
1、基坐标系
基坐标系是以机器人安装基座为基准、用来描述机器人本体运动的直角坐标系。任何机器人都离不开基坐标系,也是机器人TCP在三维空间运动空间所必须的基本坐标系(面对机器人前后:X轴 ,左右:Y轴, 上下:Z轴)。
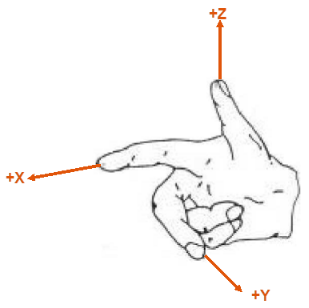
坐标系遵守右手准则:
2、大地坐标系
大地坐标系:大地坐标系是以大地作为参考的直角坐标系。在多个机器人联动的和带有外轴的机器人会用到,90%的大地坐标系与基坐标系是重合的。

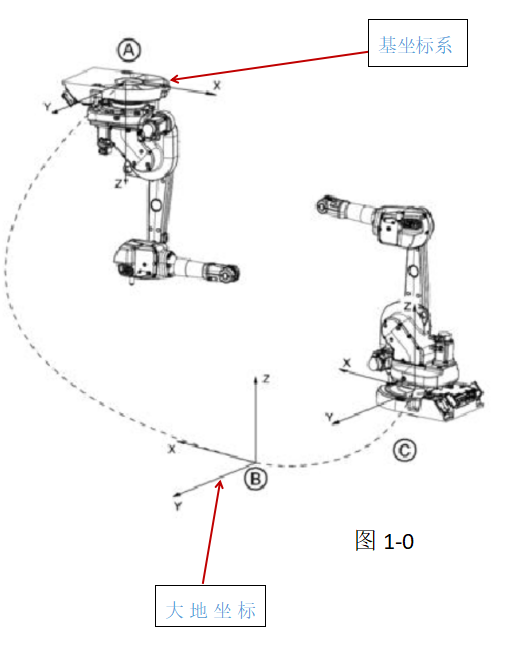
但是在以下两种情况大地坐标系与基坐标系不重合:
(1)机器人倒装。如图1-0,倒装机器人的基坐标与大地坐标Z轴的方向是相反,机器人可以倒过来,但是大地却不可以倒过来。
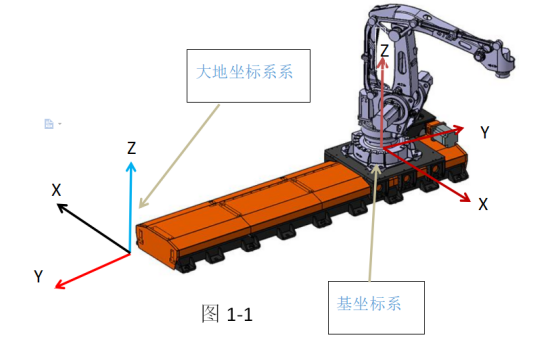
(2)带外部轴的机器人,如图1-1,大地坐标系固定好位置,而基坐标系却可以随着机器人整体的移动而移动。
3、工具坐标系
工具坐标系:是以工具中心点作为零点,机器人的轨迹参照工具中心点,不再是机器人手腕中心点Tool0(如图1-2)了,而是新的工具中心点(如图1-3)。

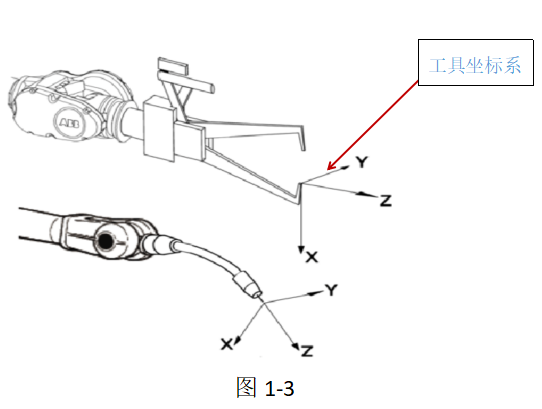
例如:焊接的时候,我们所使用的工具是焊枪,所以可把工具坐标移植为焊枪的顶点。而用吸盘吸工件时使用的是吸盘,所以我们可以把工具坐标移植为吸盘的表面(如图1-5)。
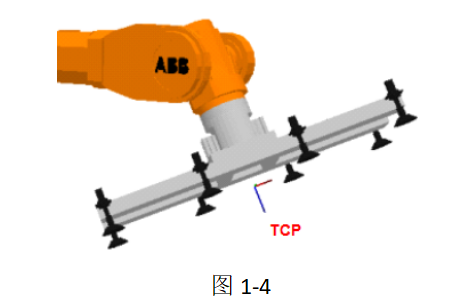
4、例如焊接的时候,我们所使用的工具是焊枪,所以可把工具坐标移植为焊枪的顶点。而用吸盘吸工件时使用的是吸盘,所以我们可以把工具坐标移植为吸盘的表面(如图1-5)。
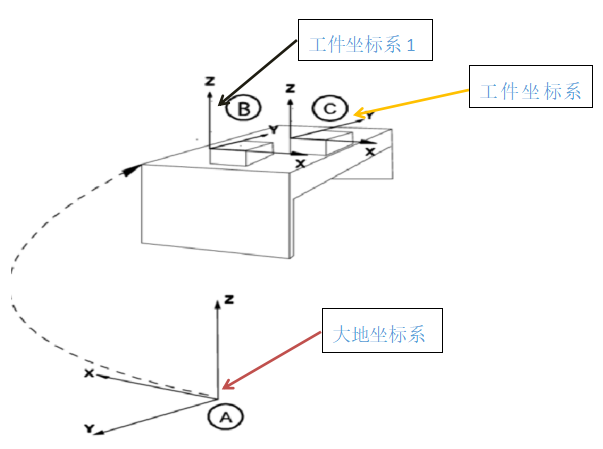
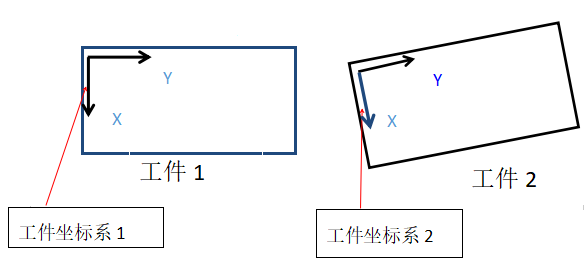
充分利用工件坐标系能让我们编程达到事半功倍的效果。![]()
例如:机器人加工工件1,轨迹编程已经编好,另外有工件2,轨迹不需要重复编程只要把工件坐标系1改为工件坐标系2即可。(技成培训原创,作者:郭彪,未经授权不得转载,违者必究!)
西门子PLC模块,CPU200XPCN,DP电缆,触摸屏,CPU,交换机模块西门子PLC模块,CPU200XPCN,DP电缆,触摸屏,CPU,交换机模块西门子PLC模块,CPU200XPCN,DP电缆,触摸屏,CPU,交换机模块西门子PLC模块,CPU200XPCN,DP电缆,触摸屏,CPU,交换机模块西门子PLC模块,CPU200XPCN,DP电缆,触摸屏,CPU,交换机模块西门子PLC模块,CPU200XPCN,DP电缆,触摸屏,CPU,交换机模块

联系方式
- 地址:上海 上海市松江区石湖荡镇塔汇路755弄29号1幢一层A区213室
- 邮编:201600
- 电话:15021292620
- 销售:颜娟
- 手机:15021292620
- 传真:021-33556143
- 微信:X15021292620
- QQ:2799536152
- Email:2799536152@qq.com