吕梁西门子授权PLC模块总代理|2023西门子PLC选型






吕梁西门子授权PLC模块总代理|2023西门子PLC选型吕梁西门子授权PLC模块总代理|2023西门子PLC选型
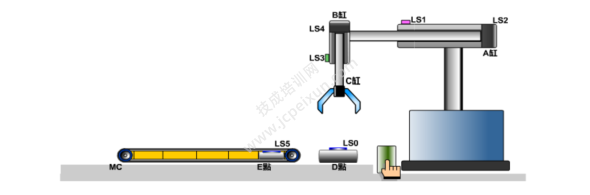
其实该控制系统是利用机械手臂搬运工件,传送带传送工件。
控制要求如下:
1、工件的补充使用人工控制,可直接将工件放在D点(LS0动作)。
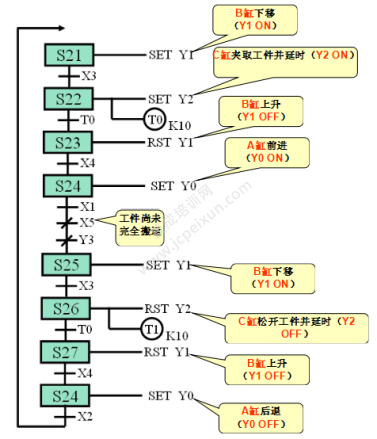
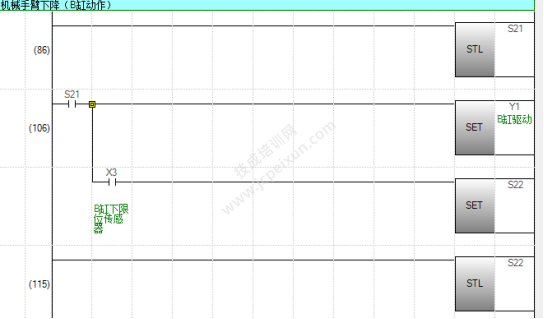
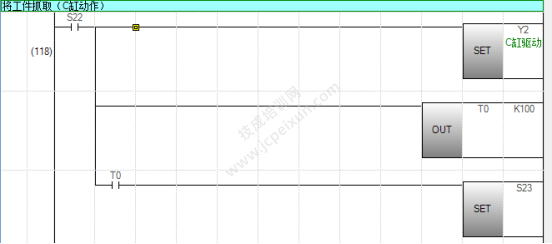
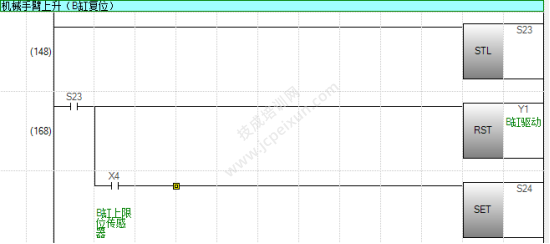
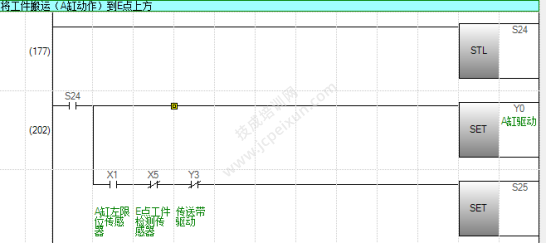
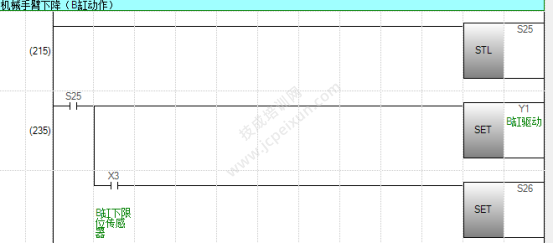
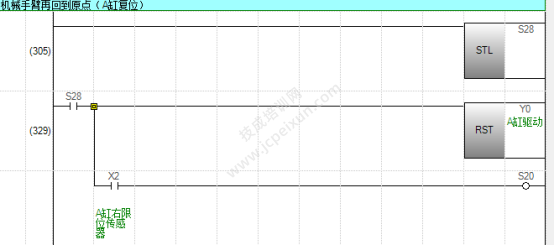
2、只要D点有工件,机械手臂即先下降(B缸动作)将工件抓取(C缸动作)后上升(B缸复位),再将工件搬运(A缸动作)到E点上方,机械手臂再次下降(B缸动作)后放开(C缸复位)工件,机械手臂上升(B缸复位),后机械手臂再回到原点(A缸复位)。
3、A,B,C缸均为单作用气缸,使用电磁控制。C缸在抓取或放开工件后,都需有1秒的间隔,机械手臂才能动作。
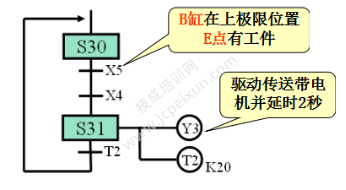
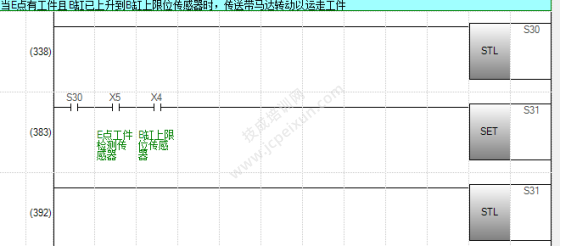
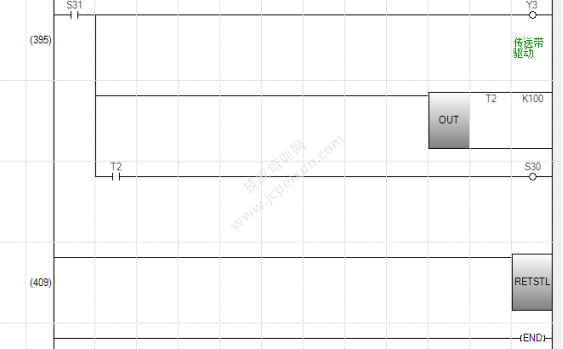
4、当E点有工件且B缸已上升到LS4时,传送带马达转动以运走工件,经2秒后传送带马达自动停止。工件若未完全运走(计时未到)时,则应等待传送带马达停止后才能将工件移走。
我们首先对机械手控制系统的控制功能进行分析。
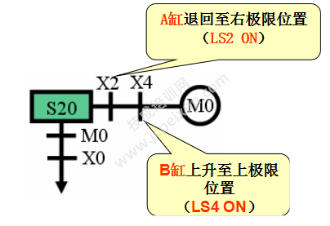
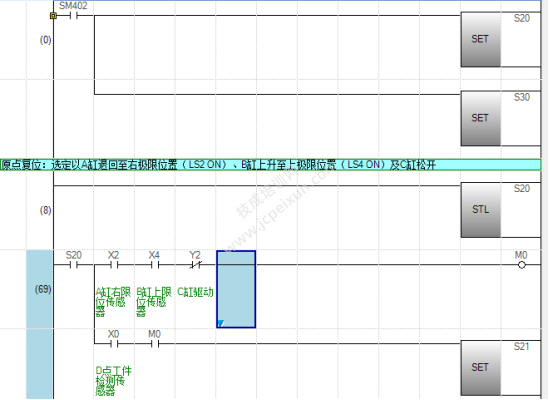
1、原点复位:选定以A缸退回至右极限位置(LS2 ON)、B缸上升至上极限位置(LS4 ON)及C缸松开为机械手臂的原点。执行一个动作之后,应做原点复位的侦测(因为A、B、C缸均为单作用气缸,所以会自动退回原点)。
2、工件搬运流程:动作为循环式单流程结构。
3、传送带流程:在检测到E点有工件,且B缸在上极限位置时,应驱动传送带转动。
4、工件搬运和传送带两个流程可以同时进行,使用并行性分支流程来完成。
我们在对控制功能分析之后,然后对机械手控制系统进行IO分配。

接着是根据机械手控制系统的流程规律和转移条件,绘制顺序功能图。
1、原点复位流程
2、工件搬运流程
3、传送带流程
我们将以上的分流程的顺序功能图合并起来,组合成如下的顺序功能图。
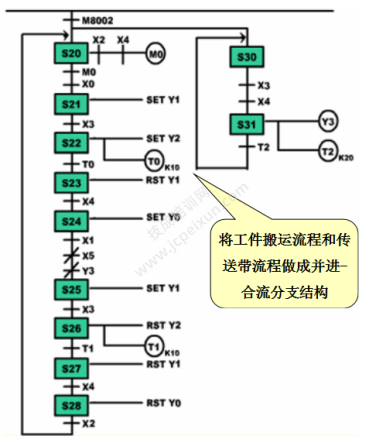
后,我们根据绘制好的顺序功能图编写出步进指令梯形图程序就可以了。
程序是以FX5U PLC为例,以GX WORKS3软件编写的。具体程序如下:


吕梁西门子授权PLC模块总代理|2023西门子PLC选型 吕梁西门子授权PLC模块总代理|2023西门子PLC选型

- 灌南低噪音发电机租赁 2023已更新一日达
- 富阳区200KW低噪音发电车出租 2023已更新一日达
- 2023年关于兽药GSP管理规范注册地址
- 2023年关于兽药gsp仓库面积要求库房长租短租 提供一站式服务 瓣客
- 江北区200KW低噪音发电车出租 2023已更新一日达
- GB/T 2423.55-2023 锤击试验标准 锤击试验方法介绍
- 关于第八届中国创新挑战赛(浙江)暨2023年浙江省技术需求“揭榜挂帅”大赛获奖名单的公示
- 关于兑现2023年度科技服务机构辅导新认定国家高企奖励和报备2025年国家高企新申报意向企业的通知
- 广州ICP转让,带ICP许可证公司转让,2023年 无需到场 加急出售
- 转让出售广西icp公司 科技类 2023年5月份成立 无经营 无流水
联系方式
- 地址:上海 上海市松江区石湖荡镇塔汇路755弄29号1幢一层A区213室
- 邮编:201600
- 电话:15021292620
- 销售:颜娟
- 手机:15021292620
- 传真:021-33556143
- 微信:X15021292620
- QQ:2799536152
- Email:2799536152@qq.com