西门子S7-400中央处理单元CPU416-2
西门子S7-400中央处理单元CPU416-2西门子S7-400中央处理单元CPU416-2西门子S7-400中央处理单元CPU416-2
现货PLC;S7-200S7-300 S7-400 S7-1200 触摸屏,变频器,6FC,
6SNS120 V10 V60 V80伺服数控备件:原装进口电机(1LA7、1LG4、1LA9、1LE1),国产电机(1LG0,1LE0)
大型电机(1LA8,1LA4,1PQ8)伺服电机(1PH,1PM,1FT,1FK,1FS)西门子保内全新原装产品质保一年。
一年内因产品质量问题免费更换新产品;不收取任何费。欢迎致电咨询。《销售态度》:质量保证、诚信服务、及时到位!
《销售宗旨》:为客户创造价值是我们永远追求的目标!
《服务说明》:现货配送至全国各地含税(13%)含运费!
《产品质量》:原装**,全新原装!
《产品优势》:专业销售 薄利多销 信誉好,口碑好,价格低,货期短,大量现货,服务周到!西门子SIEMENS授权一级代理商。西门子SIEMENS模块授权代理商
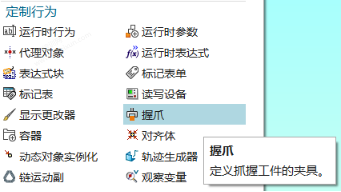
在使用MCD进行机器人搬运仿真时,经常需要自定义机器人的夹具,设置好刚体、碰撞体、滑动副、传感器及位置控制,操作起来比较繁琐。在新版本的NX中新增加了“握爪”工具,使用握爪工具可以方便地定义吸盘或手指握爪从而进行对象抓取操作。
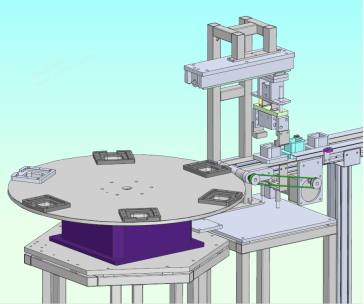
以手指握爪类夹具为例,创建一个二自由度的机械手用于工件搬运。
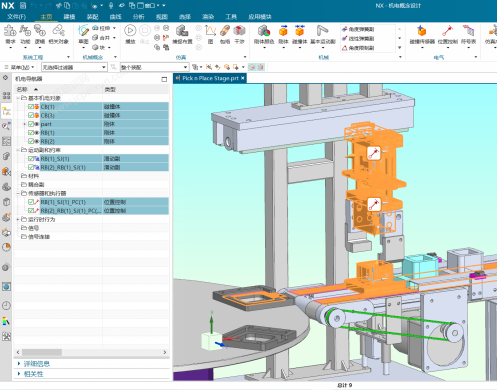
首先需要定义好除了手指握爪外的所有机电对象,注意使用握爪工具来创建夹具不需要定义夹具刚体、碰撞体以及滑动副等对象。
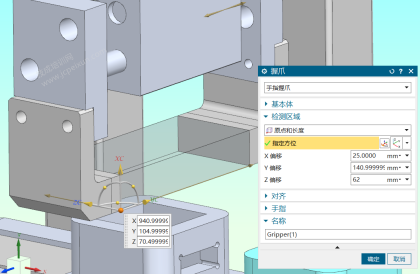
接下来创建一个握爪,基本体选择夹具手指依附的刚体。
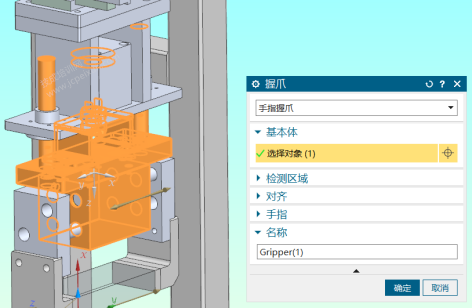
定义检测区域用于检测抓握对象,抓握对象的刚体需要有碰撞体存在,有多种方式可以定义检测区域,这里以“原点和长度”为例。

指定方位选择到手指的一个端点,X、Y、Z偏移可以痛过测量得到,一般只要保证三个偏移值所定义的检测区域能够检测到碰撞体就可以了。
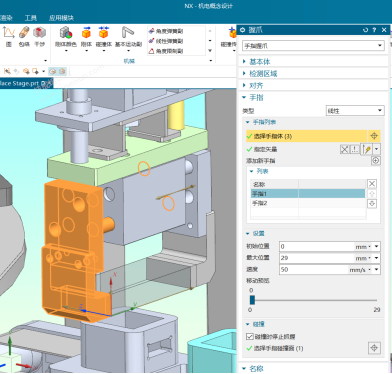
添加握爪的手指,要将单个手指的所有实体都加到手指体当中,并指定手指运动的方向,还可以设定手指运动的初始位置、*大位置和运动速度。此外,勾选“碰撞时停止抓握选项”并选择碰撞面可以使得握爪在发生碰撞时便停止抓握,目前只能定义一个碰撞面。
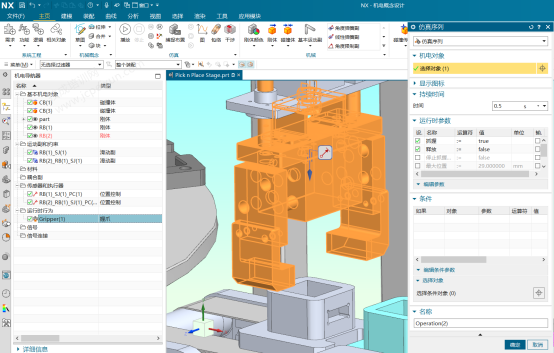
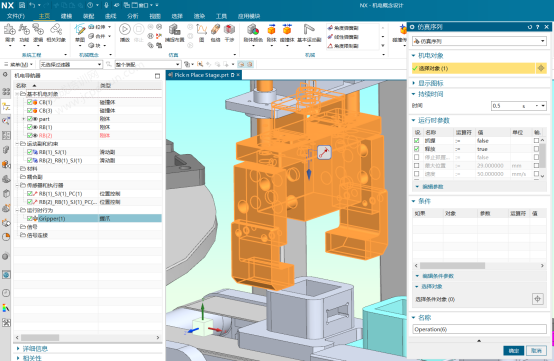
到此完成了握爪的定义,接下来创建仿真序列实现机械手搬运动作,对于握爪的抓取与释放动作需要控制到两个参数。
- 咸宁西门子S7-1200模块代理商 2023-11-04
- 6AV2123-2DB03-0AX0一级代理商 2023-11-04
- 西门子S7-1200中央处理器CPU416-2 2023-11-04
- 西门子PLC模块CN模块控制器 2023-11-04
- 6AV2123-2GB03-0AX0一级代理商 2023-11-04
- 西门子PLC模块200CN继电器 2023-11-04
- 2023更新黄冈西门子S7-1200代理商 2023-11-04
- 深圳西门子S7-400模块CPU416-2 2023-11-04
- 鹤壁西门子一级代理商 2023-11-04
- 西门子PLC模块继电器输出 2023-11-04
- 6AV2123-2MA03-0AX0一级代理商 2023-11-04
- 德国授权供应6AV2123-2MB03-0AX0 2023-11-04
- 6AV6648-0DE11-3AX0一级代理商 2023-11-04
- 西门子PLC模块222CN可编程控制器 2023-11-04
- 焦作西门子一级代理商 2023-11-04
联系方式
- 地址:上海 上海市松江区石湖荡镇塔汇路755弄29号1幢一层A区213室
- 邮编:201600
- 电话:15021292620
- 销售:颜娟
- 手机:15021292620
- 传真:021-33556143
- 微信:X15021292620
- QQ:2799536152
- Email:2799536152@qq.com