广东云浮西门子一级代理商广东云浮西门子一级代理商广东云浮西门子一级代理商
| SIEMENS | 电源 | 6ES7307-1KA02-0AA0 |
| SIEMENS | 模块 | 6ES7131-6BH01-0BA0 |
| SIEMENS | 模块 | 6ES7193-6BP20-0DA0 |
| SIEMENS | 接头 | 6GK1901-1BB10-2AA0 |
| SIEMENS | 接头 | 6GK1901-1BB20-2AA0 |
| SIEMENS | 内存卡 | 6ES7952-1AK00-0AA0 |
| SIEMENS | 模块 | 6ES7421-1FH00-0AA0 |
| SIEMENS | 触摸屏 | 6AV6648-0CC11-3AX0 |
| SIEMENS | 触摸屏 | 6AV6648-0CE11-3AX0 |
| SIEMENS | 模块 | 6ES7142-3BH00-0XA0 |
| SIEMENS | 模块 | 6ES7288-3AE08-0AA0 |
| SIEMENS | 模块 | 6ES7288-2DT16-0AA0 |
| SIEMENS | 模块 | 6ES7288-3AR04-0AA0 |
| SIEMENS | 交换机 | 6GK5005-0BA00-1AB2 |
| SIEMENS | 触摸屏 | 6AV2123-2MB03-0AX0 |
| SIEMENS | 电缆 | 6XV1840-2AH10 |
| SIEMENS | 底座 | 6ES7193-6BP00-0BA0 |
 ST指令,即状态初始化指令,所谓状态初始化,简单来说,是对某些状态继电器 S 赋予特定的功能,不同的状态继电器对应不同的工作方式。那么,问题又来了,这里的工作方式又是什么呢?
ST指令,即状态初始化指令,所谓状态初始化,简单来说,是对某些状态继电器 S 赋予特定的功能,不同的状态继电器对应不同的工作方式。那么,问题又来了,这里的工作方式又是什么呢?
所谓工作方式,指的是控制系统的各种控制方式,如手动控制、自动控制等。大多数工业生产自动化控制系统都是顺序控制系统,它们在硬件设备上集成一体化,可以自动或半自动地完成整个控制过程。除此之外,这个控制系统还应包含手动工作方式和原点回归工作方式。即一个完整的控制系统,是结合多种工作方式的系统,这些工作方式之间可以自由切换,而其切换靠的就是IST指令。
一、工作方式
就上文所言,一个完整的控制系统具有多种工作方式,大体上可以分为以下5种:
(1)原点回归工作方式
原点回归是指将设备回归到整个控制流程的出发点,即*初机械位置。我们以机器人为例,控制要求是机器人能根据歌曲跳完一支舞,每句歌词都有对应的舞蹈动作,机器人初始动作为立正姿势。若它跳着跳着突然因低电量不足或音乐中断而定住,我们就可以切换至原点回归工作方式,让机器人回到*初的立正姿势。
| 品牌 | 产品名称 | 规格型号 |
| SIEMENS | 电源 | 6ES7307-1BA01-0AA0 |
| SIEMENS | 电源 | 6ES7307-1KA02-0AA0 |
| SIEMENS | 模块 | 6ES7131-6BH01-0BA0 |
| SIEMENS | 模块 | 6ES7193-6BP20-0DA0 |
| SIEMENS | 接头 | 6GK1901-1BB10-2AA0 |
| SIEMENS | 接头 | 6GK1901-1BB20-2AA0 |
| SIEMENS | 内存卡 | 6ES7952-1AK00-0AA0 |
| SIEMENS | 模块 | 6ES7421-1FH00-0AA0 |
| SIEMENS | 触摸屏 | 6AV6648-0CC11-3AX0 |
| SIEMENS | 触摸屏 | 6AV6648-0CE11-3AX0 |
| SIEMENS | 模块 | 6ES7142-3BH00-0XA0 |
| SIEMENS | 模块 | 6ES7288-3AE08-0AA0 |
| SIEMENS | 模块 | 6ES7288-2DT16-0AA0 |
同理,在工业控制中,若因断电或其他原因使得控制中断,应通过原点回归程序使得设备回到原点位置。
(2)手动工作方式
手动工作方式,是指通过手动方式对整个流程中的各个执行器单独控制其工作和停止,不一定按步进顺序进行。例如控制机器人跳舞,我们想看看它能不能对歌词进行判断,这时候可以直接抽取某句歌词播放,看机器人是否正确动作。
同理,在工业生产前,可以用手动方式直接对各个器件、电机进行试验,判断其是否能正常工作。另外,若在自动控制的中途因意外停止,也可以通过手动方式继续完成一个周期的工作。
(3)单步运行工作方式
所谓单步运行,简单来说,就是在整个控制流程中,各个状态步之间的转移条件由手动接通。它和手动工作方式的不同在于:手动工作方式没有顺序的要求,每次的控制不一定是恰好的状态步;而单步运行的每一次手动接通,都意味着上一个状态步的结束和下一个状态步的开始,且按顺序控制流程进行转移。
所以单步运行工作方式可以用于观察控制流程的顺序是否正确,每一状态步内的动作是否满足要求等。例如对机器人的控制,为了判断它的跳舞动作书否按歌词的顺序正确执行,我们手动控制歌曲按歌词顺序一句一句地播放,而不是直接让歌曲自动播放完。
(4)单周期运行工作方式
单周期运行方式是指控制流程只运行一次,即一个周期,就像机器人的控制,歌曲只播放一次,播完即止,机器人跳完舞恢复为原来的立正姿势,直到我们再次播放音乐。
同理,在自动化流程控制中,每一次启动,都是一次流程的完整执行,执行完后设备回归到初始位置,不会重复执行。
单步和单周期的区别在于,单步是一次完成一个状态步,而单周期是一次完成整个控制流程。单周期工作方式是一种半自动工作方式,在这种工作方式下,若在系统运行期间按下停下按钮,则工序会停在相应的位置,直到再次按下启动按钮,工序会在上次停下的地方继续往下执行。这其实也很好理解,例如在机器人的控制中,歌曲播放到中途暂停,机器人也像按下暂停键一样停止动作,直到歌曲继续播放。

(5)自动运行工作方式
自动运行工作方式,是指整个控制流程自动重复执行,例如在机器人控制中,歌曲重复播放,所以机器人也相应的重复跳舞。
在自动运行工作方式下,若中途按下停止按钮,流程不会停止,而是会继续完成一个周期后回到初始位置才停止,这显然和单周期工作方式不同。例如在机器人控制中,这次不是让歌曲暂停播放,而且将歌曲的播放方式由“单曲循环”切换至“只播放一次”。

以上5种工作方式各有各的作用和特点,前两者有着独有的功能,但后面三种其实可以归为一类,因为它们都是按同一个顺序控制流程来执行的,只不过是执行的控制方式不同。
基于各种不同的工作方式,IST就被赋予了实际的意义,即实现对各种工作方式的切换。
二、状态初始化指令IST与其软元件
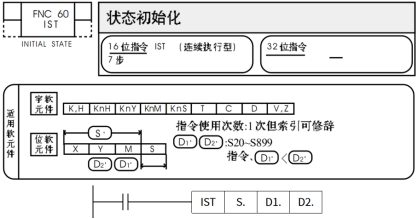
IST指令的编程手册截图如上图所示,该指令有3个操作数,其中源址S是多种工作方式的选择开关输入位元件起始地址,终址D1、D2分别为程序中一般状态继电器的*小编号和*大编号。
既然源址为开关输入位元件的起始地址,毫无疑问,IST指令要占用PLC的输入口X,而且有相应的外部接线要求,关于这部分的更多内容,我们在下篇文章再加以讲解。现在,我们就先来看看IST指令的软元件部分内容吧。

基于步进控制的IST指令,其涉及的软元件显然离不开状态继电器S,还有上两篇文章所提及的特殊辅助继电器,如上图所示为相关软元件列表。
其中S0为手动工作方式SFC的初始状态继电器编号,S1为原点回归工作方式SFC的初始状态继电器编号,S2为自动工作方式SFC的初始状态继电器编号。说到这里,可能有些人就有疑问了,单步工作方式和单周期工作方式没有SFC初始状态继电器吗?这个问题很简单,上文说到,单步、单周期和自动是可以归为一类的,因为它们是属于同于SFC的不同控制方式,所以,大家懂得。

除了S0~S2被IST指令指定外,余下的S3~S9可以用于其他SFC,而S10~S19是原点回归方式专用状态继电器,不可用于其他SFC,同样的,原点回归方式中除了S1外也只能用S10~S19,不能用其他状态继电器。这不就是传说中的“有得必有失”吗?得到相应的特权,必定会失去其他的权利,我悟了~
了解了状态继电器S后,我们继续看特殊辅助继电器。M8040和M8047不用多说,在前两篇文章中已有说明,即当M8040接通,禁止所有状态之间的转移;M8047接通,可以自动读取正在工作的状态继电器编号。
M8041表示自动方式开始状态转移,由IST指令驱动,并在自动方式执行过程中保持接通。即在执行IST指令的情况下,若将工作方式切换至自动方式,M8041被置ON。
M8042表示启动脉冲,当工作方式切换至自动方式或原点回归方式瞬间,M8042将产生一个脉冲信号。

M8043表示原点回归方式结束,需要程序员在程序中驱动,而不是像M8041那样由IST指令驱动。也就是说,当我们编写原点回归方式的程序时,在程序末尾驱动M8043,表示原点回归方式的结束,机器已返回原点。
M8044表示原点标志,即当机器设备处于*初机械位置时,由相应的原点检测条件驱动M844为ON。
广东云浮西门子,一级代理商,PLC模块,交换机供应,电缆广东云浮西门子,一级代理商,PLC模块,交换机供应,电缆广东云浮西门子,一级代理商,PLC模块,交换机供应,电缆广东云浮西门子,一级代理商,PLC模块,交换机供应,电缆广东云浮西门子,一级代理商,PLC模块,交换机供应,电缆
