梅州西门子电机一级代理商梅州西门子电机一级代理商梅州西门子电机一级代理商
S7-200SMART如何驱动XY轴平台实现画多边形的功能,文中以画三角形为例给大家介绍,希望大家通过对该文章的阅读及理解可实现画多边形的功能。交换机一级代理商,西门子交换机代理商,西门子S7-1200系列代理商,西门子S7-1200CPU
分销商,西门子S7-1200CPU分销商,西门子S7-1500CPU代理商,西门子S7-1500CPU代理商,西门子模块代理商,西门子模块一级代理商,西门子模块总代理商,西门子模块分销商,西门子模块代理商
| SIEMENS | 触摸屏 | 6AV2123-2MB03-0AX0 |
| SIEMENS | 电缆 | 6XV1840-2AH10 |
| SIEMENS | 底座 | 6ES7193-6BP00-0BA0 |
| SIEMENS | 底座 | 6ES7193-6BP00-0DA0 |
| SIEMENS | 模块 | 6ES7141-3BH00-0XA0 |
| SIEMENS | 模块 | 6ES7212-1AE40-0XB0 |
| 合信 | 模块 | CTS7114-1BD20-0620 |
| SIEMENS | DP电缆 | 6XV1830-0EH10 |
| SIEMENS | 内存卡 | 6ES7954-8LE03-0AA0 |
| SIEMENS | 模块 | 6ES7521-1BH10-0AA0 |
| SIEMENS | 模块 | 6ES7135-6HD00-0BA1 |
| SIEMENS | 模块 | 6ES7195-7HD10-0XA0 |
| SIEMENS | 模块 | 6ES7288-3AM06-0AA0 |
| SIEMENS | 模块 | 6ES7241-1CH32-0XB0 |
| SIEMENS | 触摸屏 | 6AV2124-0MC01-0AX0 |
| SIEMENS | 模块 | 6ES7215-1AG40-0XB0 |
| SIEMENS | 模块 | 6ES7223-1BL32-0XB0 |
| Siemens | 电池板 | 6ES7288-5BA01-0AA0 |
| Siemens | 交换机 | 6GK5004-1BD00-1AB2 |
| SIEMENS | 电源 | 6ES7288-0CD10-0AA0 |
| Siemens | 模块 | 6ES7223-1BH32-0XB0 |
 一、 实验设备介绍
一、 实验设备介绍
(1)西门子S7-200SMART系列PLC,CPU型号为ST20。
(2) XYZ轴平台一套,该平台有三个步进驱动器,三套电机配合丝杆,在本例子因ST20型号的CPU只支持2轴高速脉冲输出,所以只驱动X轴和Y轴。实验平台如下图所示:
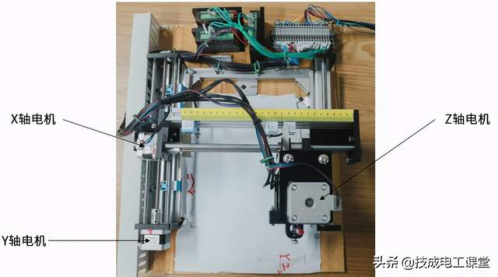
注:定义往电机方向移动为正方向,丝杆的逻辑为4mm,步进驱动的细分设置为3200个脉冲一转。
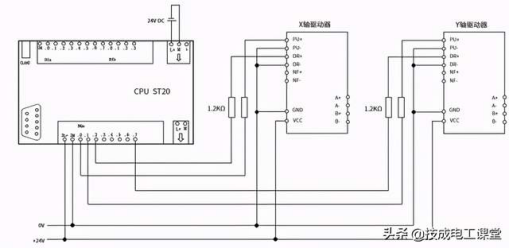
CPU输出端Q0.0和Q0.2分半为X轴的脉冲和方向信号,Q0.1和Q0.7为Y轴的脉冲和放信号,步进驱动器有PLC的接线图如下所示:
二、 直线插补算法说明
如下图所示,原点,1#点,2#点,三点构成了一个三角形,若需要使用S7-200SMART系列PLC驱动前面所描述的XY轴实验平台画出来,则需要用到XY轴同时运动来实现走直线的功能,但S7-200SMART系列PLC没有直线插补功能,只能考虑自编程序来实现。
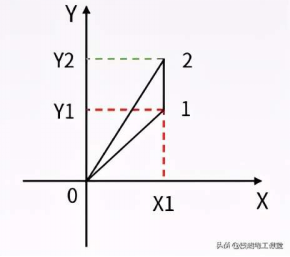
如上图所示,X轴和Y轴要同时从原点启动到1#点位置,则X轴和Y轴所移动的时间是相同的,因此已知目标位置的坐标及一个轴的速度(主站速度),然后根据已知的轴的位置和速度计算出时间后再去计算出另外一个轴的速度。根据此原则则可得到如下公式:

三、三角形移动程序设计说明
根据分析,对S7-200SMART系列PLC的驱动XY轴平台实现三角形运动的程序设计主要分为“运动向导的组态配置”、“初始化与回原点程序”、“速度换算程序”、“取**值程序”、“开始运行程序”几部分组成。
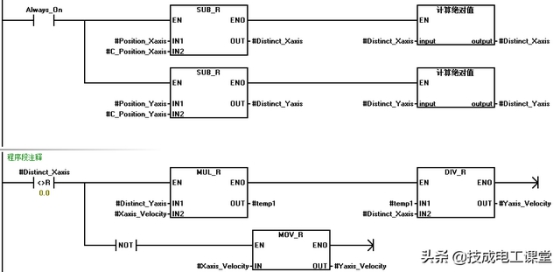
(1)速度换算程序
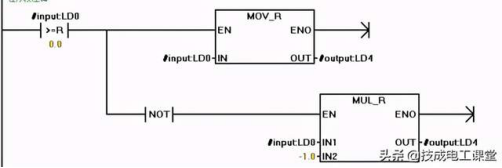
速度换算程序,根据给定的X轴的速度,计算出Y轴的速度,在输的计算中为了保证计算得到的速度值为正数,因此对目标位置减去当前位置后得到的结果去**值运算,因此还需要编写取**值的子程序。如下图所示,第一段程序为取**值运算的子程序,第二段为速度换算的子程序。
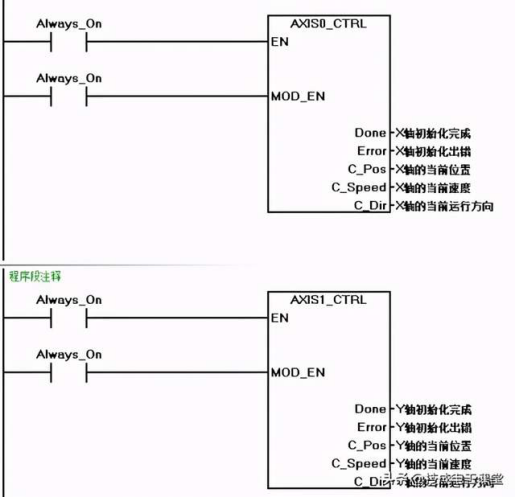
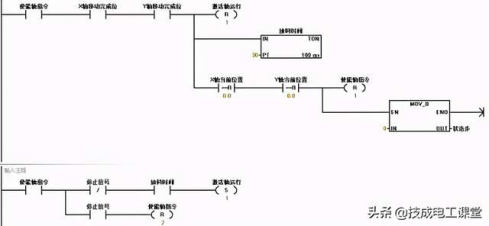
(2)初始化和回原点程序设计
对X轴和Y轴分别进行初始化,初始化程序如下图所示
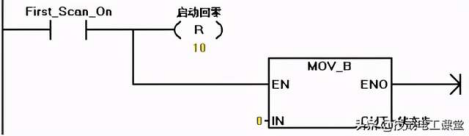
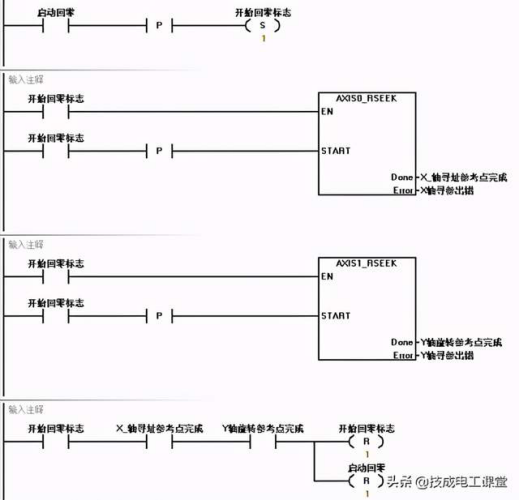
对X轴和Y轴分别心回原点操作,使画笔移动到原点位置
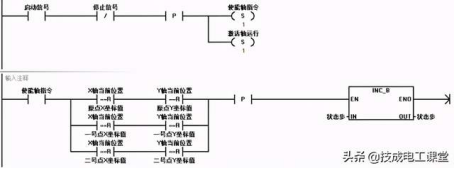
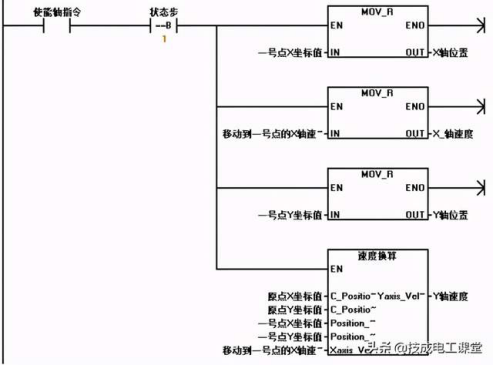
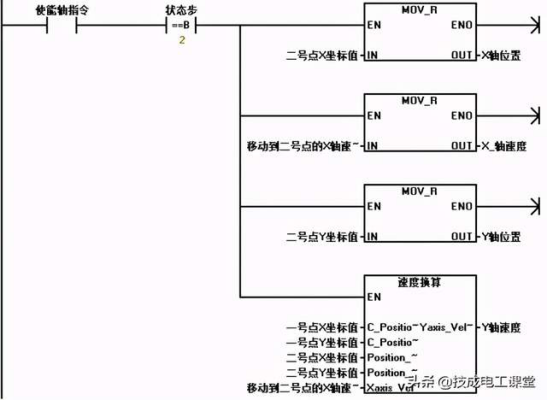
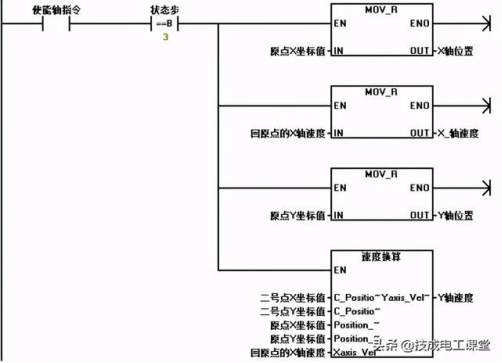
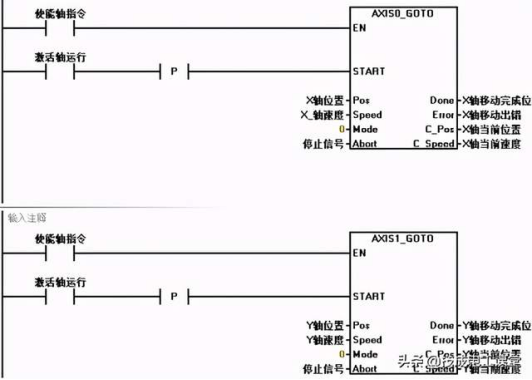
(3)编写走三角形运行程序
四、结语
程序仅供参考,实际使用请根据情况进行修改,需要通过该案例后大家可一反三,能够编写出更复杂的程序。
梅州西门子电机一级代理商梅州西门子电机一级代理商梅州西门子电机一级代理商梅州西门子电机一级代理商梅州西门子电机一级代理商梅州西门子电机一级代理商梅州西门子电机一级代理商梅州西门子电机一级代理商梅州西门子电机一级代理商
- 西门子PLC供应晶体管模块CPU224CN 2023-11-04
- 来宾西门子S7-1200代理商 2023-11-04
- 西门子S7-400模块中央控制器 2023-11-04
- 惠州西门子DP电缆一级代理商 2023-11-04
- 西门子S7-400模块控制器CPU 2023-11-04
- 河池西门子S7-1200代理商 2023-11-04
- 贺州西门子S7-1200代理商 2023-11-04
- 西门子S7-400可编程控制器CPU模块 2023-11-04
- 肇庆西门子CPU一级代理商 2023-11-04
- 西门子CPU224CN主机模块 2023-11-04